31/jan/2013 �V�K
26/dec/2015 �X�V
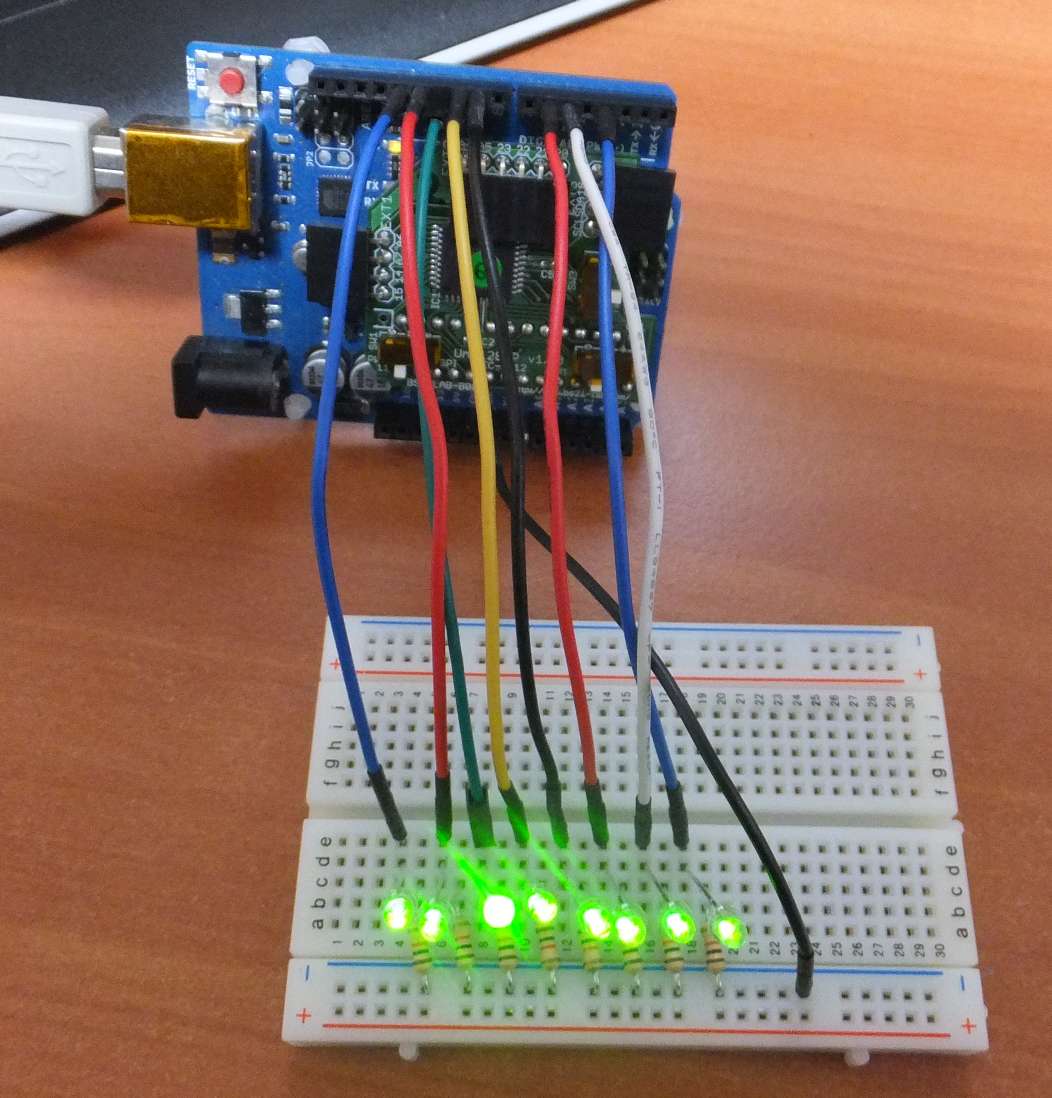
Arduino �� CPU �\�͂��p���[�A�b�v�����ł��B
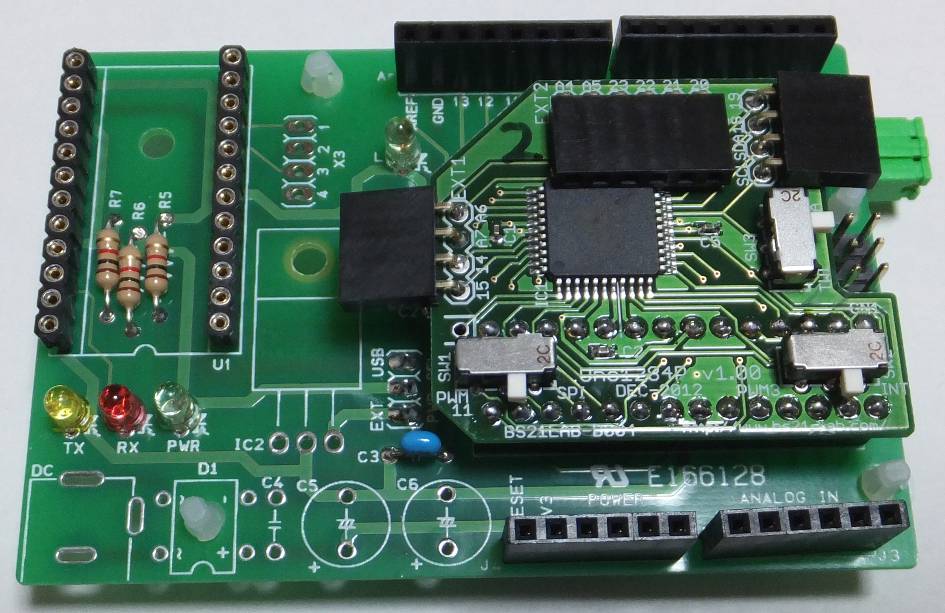
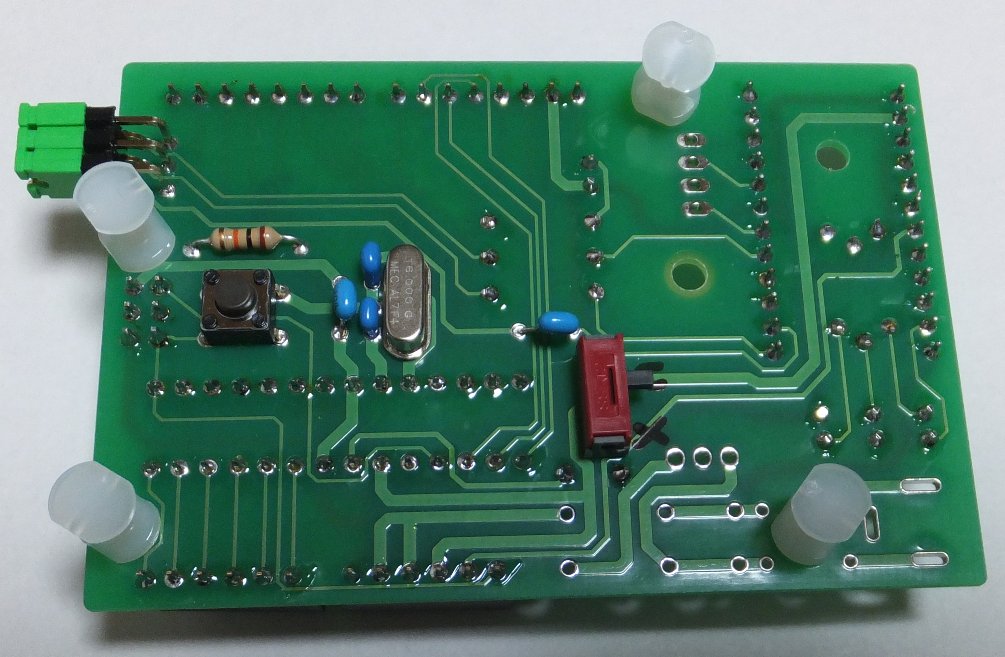
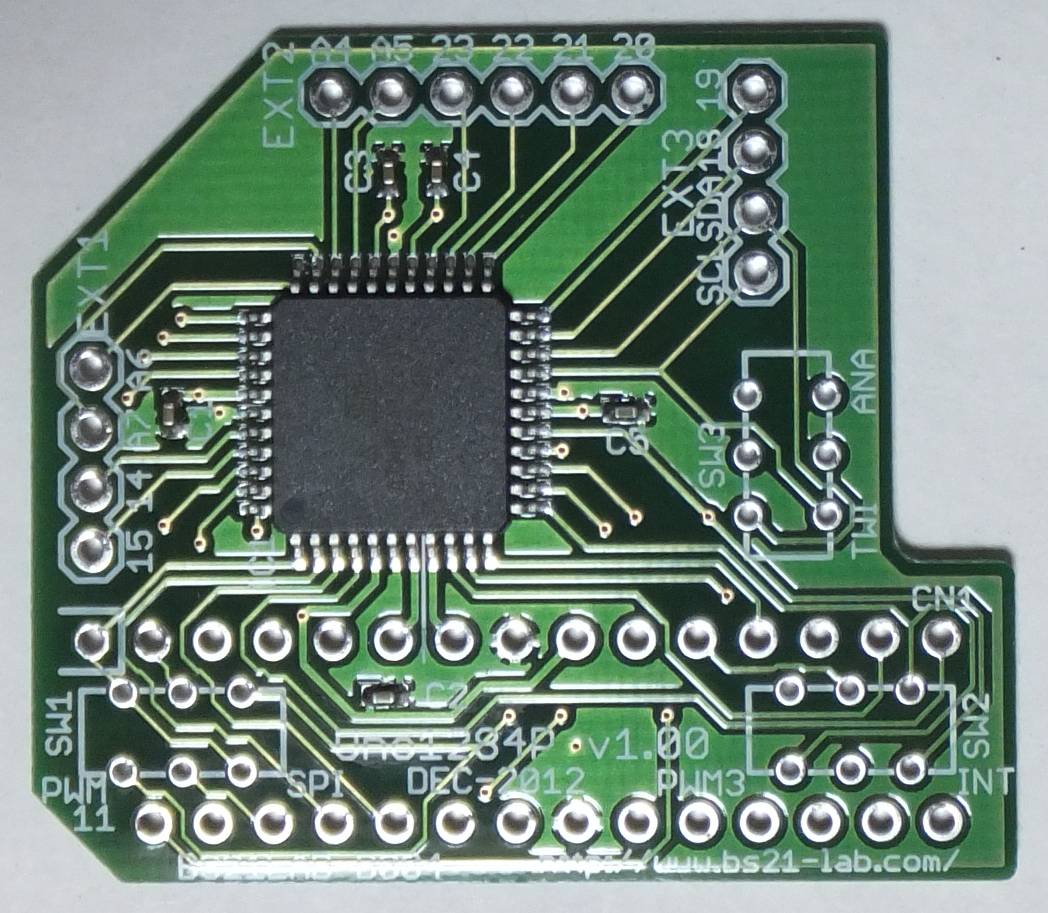
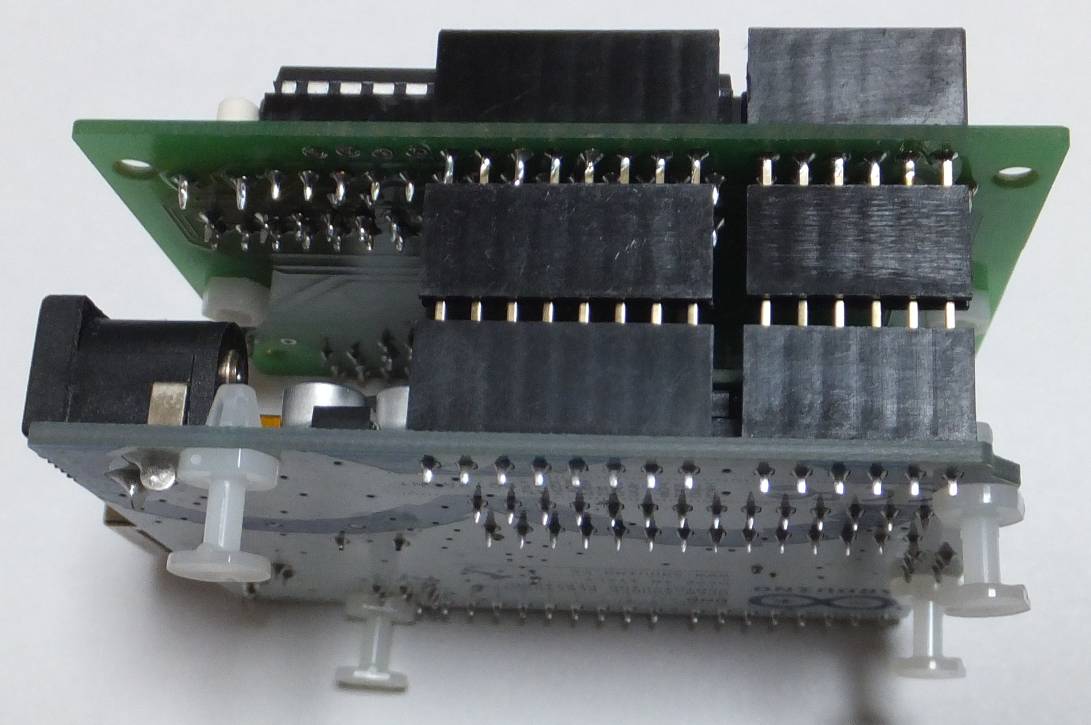
�{��� (Atmel �� ATmega1284P�F�ȉ��uUno1284P ����v�ƌĂт܂�) ���AArduino UNO R3 �� DIP 28�s�� CPU (Atmel �� ATmega328P) �����������鎖�ŁA
Arduino �� CPU �\�͂��p���[�A�b�v�����܂��B
�v���O������������ 128 kB (Arduino UNO R3 �Ɣ�ׂāA�S�{)�ASRAM �� 16 kB (���W�{)�AEEPROM �� 4kB (���S�{)�AI/O �͂R�Q�_ (���{�P�Q�_) �ɋ�������܂��B
�u�[�g���[�_�[(Optiboot, 1kB�T�C�Y) �������ݍς��ł��̂ŁA�g�ݗ��ĂĊ�������A���A�����܂��B
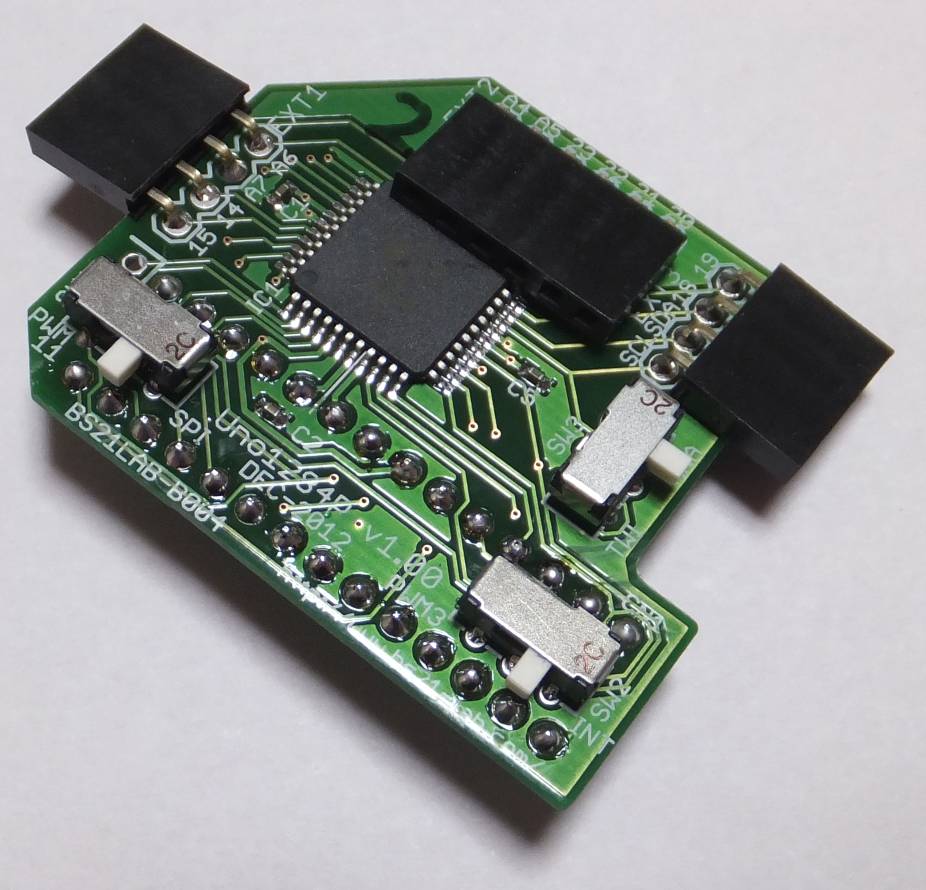
�䒍�ӁI�I�FCPU ���\�ʎ����^�C�v�� Arduino �ł́A�{��͊����ł��܂���I�IDIP �^�C�v�̂݊����\�ł��B
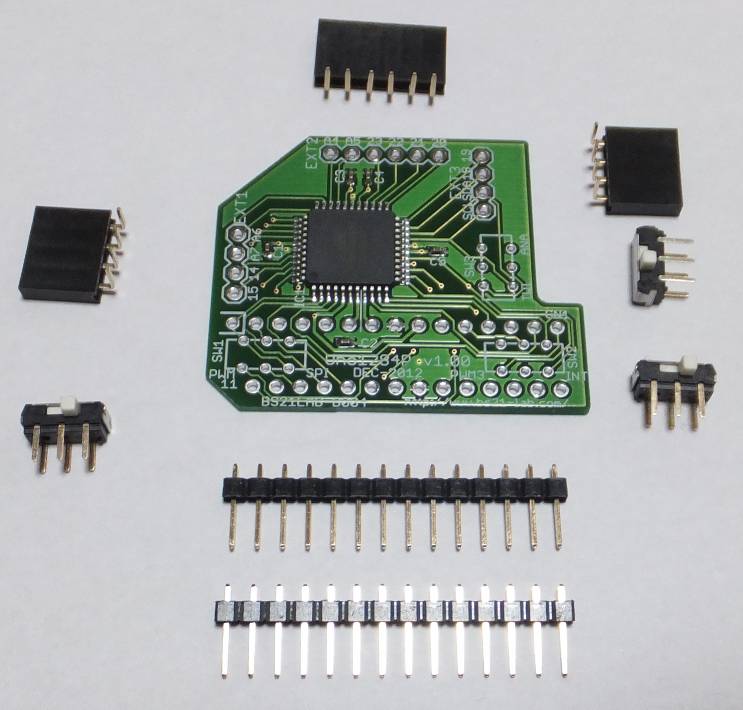
�{���i���g�ݗ��Ď��L�b�g�ƂȂ��Ă��܂��B�g�ݗ��ĕ����g���ĕ��@���䗗�������B
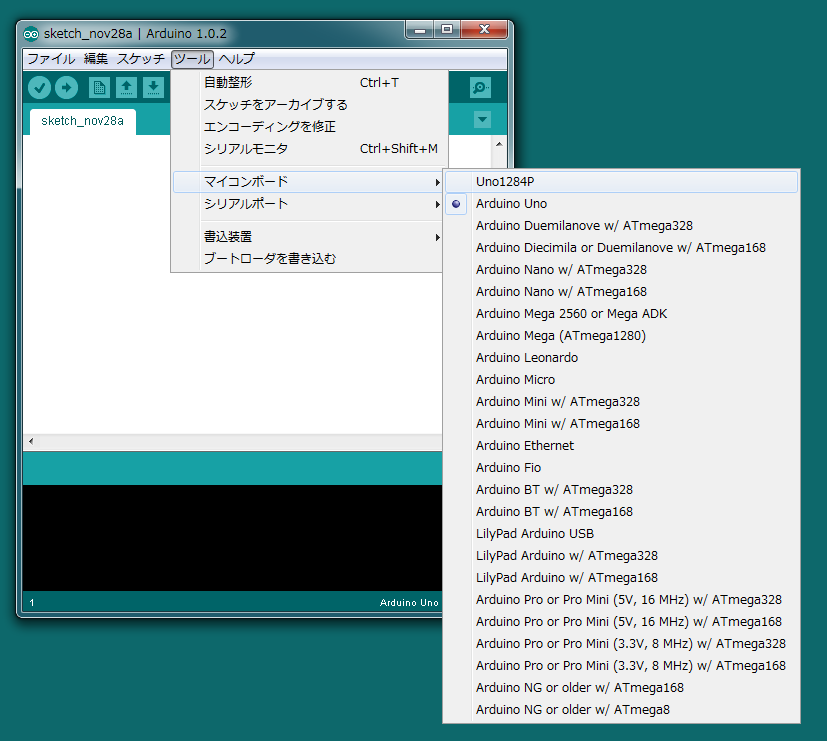
2015/12/26 �NjL�FArduino IDE 1.6.7 �Ɏb��Ή����܂����B
2014/2/3 �NjL�FArduino IDE �t���� SoftwareSerial ���C�u������ GSM ���C�u�����ŁA�R���p�C�����ʂ�Ȃ������o�O���C�����܂����B
2013/7/10 �NjL�FSPI �ʐM�@�\�ɂ����āAArduino UNO R3 ����݊��ȕ������L�鎖���������܂����B �ڍׂ́A��q�� SPI �ɂ��� �������������B
| Q | A |
| �Ȃ� Arduino �݊��@�ł͂Ȃ��ACPU ������Ȃ̂ł����H | ���̕������オ�肾����ł��B����AArduino UNO R3 �� 3000�~�ȉ��A����� Uno1284P ��������Ă� 6000�~���܂����A Arduino �݊��@�ɂ����ꍇ�A�������������߂Ȃ��ƁA���̒l�i�ȉ��ɂ���͓̂�����낤�A�Ɣ��f���܂����B |
| ���� Arduino Mega2560 R3 �����邶��Ȃ����B������ĕK�v�H | �@ Arduino Mega �������^�ɂł��� �A Arduino Mega �����V�[���h�̌݊���������(�n�Y) �B SRAM �� 16kB �Ƒ傫�� |
| Sanguino �ƁA�ǂ��Ⴄ�́H | �s���̕��т�����Ă��܂��B�������� Sanguino ��� Arduino �p�V�[���h�������I�ɑ}����܂���B |
| Bobuino �ƁA�ǂ��Ⴄ�́H | �s���̕��т�����Ă��܂��B�����ABobuino �ƃs�����т��ꏏ�ɂ��悤���Ǝv���Ă����̂ł����ABobuino �� PWM �̃s���z�u�� Arduino �݊��Ŗ����̂ŁA �F�X�ƌ������Ă��������ɁA�S�R�ʕ��ɂȂ��Ă��܂��܂����B |
| �X���C�h�X�C�b�`����Ő�ւ���̂��ʓ|������ | �lj����ꂽ I/O 12�_����R�_����U���āA�����؊���������A�Ƃ����͍̂l�����̂ł����A���ׂ̈̕��i�ɂ��R�X�g�A�b�v�AArduino IDE �̉�����C�u�����̒lj��A �R�_�� I/O �����R�Ɏg���Ȃ��Ȃ鎖�A�����āA���������p�ɂɐ�ւ��鎖�͂���̂��H�ƍl���āA���ǁA��Ő�ւ�����@�ɂ��܂����B |
�{���i�́A�ȉ��̃T�C�g�Ŏ�舵���Ē����Ă���܂��B
(��)�X�C�b�`�T�C�G���X�l
�{���i�́A�d���� OFF �ɂ�������ŁA�X���C�h SW �̐�ւ����s���Ă��������B�ʓd���ɃX���C�h SW ���ւ��܂��ƁAIC ����j�鋰�ꂪ����܂��B
�d���� OFF �ɂ�����Ԃł��A�X���C�h SW ���ւ��鎞�́A�Ód�C�����Ă���s���Ă��������B
�܂��A�{���i���[�q�����I�o���Ă���A�V���[�g�Ȃǂŗe�ՂɌ̏Ⴕ�₷���Ȃ��Ă���܂��̂ŁA��舵���ɂ͏\���ɒ��ӂ��Ă��������B
�s���ȕ����������L��܂��̂ŁA���䓙�ɏ\���ɒ��ӂ��Ă��������B
�{���i���l�����Ɋւ�鑕�u�ւ̗��p�ɂ��܂��āA�l������Ă���܂����B
�܂��A�{���i���g�p�������ɂ���Ĕ������܂����@���Ȃ鎖���ɂ��܂��āA���Ђ͐ӔC�����˂܂��̂Ō䗹���������B
| ���@ | �F | ����49mm�~������35.6mm | �@ | |
| ���� | �F | ��7.5mm | �@ | �� �X���C�hSW ���� �s���w�b�_�[�̍����܂Łi�X�� IC�\�P�b�g�ɑ}����s��������4mm ����܂��j |
| �Œ���@ | �F | DIP 28�s�� | �@ | �� IC �\�P�b�g�ɑ}�����āA�Œ肳���܂� |
| �쓮�d�� | �F | ����+5V | �@ | �� +3.3V �ł̓���͖��m�F�ł� |
| �m�F������� | �F | Arduino UNO R3 AE-ATmega ��� | �@ | �� ����ȊO�̊�ł́A�����I�ɑ}���邩�ǂ������܂߂āA�m�F���Ă���܂���B |
| �@ | Arduino UNO R3 | �@ | Uno1284P | �@ | �R�����g | |
| CPU �^�� | �@ | ATmega328P | �@ | ATmega1284P | �@ | Atmel �А� |
| Flash �e�� | �@ | 32 kB | �@ | 128 kB | �@ | �S�{ ���A�� 1kB �̓u�[�g���[�_�[�̈�Ɏg�p�ς� |
| SRAM �e�� | �@ | 2 kB | �@ | 16 kB | �@ | �W�{ |
| EEPROM �e�� | �@ | 1 kB | �@ | 4 kB | �@ | �S�{ |
| I/O �_�� | �@ | �Q�O�_ | �@ | �R�Q�_ | �@ | �{�P�Q�_ (D14�`D23, A6�`A7 ���lj�) |
| �� ADC �_�� | �@ | �U�_ | �@ | �W�_ | �@ | �{�Q�_ (A6�`A7 ���lj�) |
| �� PWM �_�� | �@ | �U�_ | �@ | �W�_ | �@ | �{�Q�_ |
| �� �����ݓ_�� | �@ | �Q�_ | �@ | �R�_ | �@ | �{�P�_ (INT2 ���lj�) |
| �u�[�g���[�_�[ | �@ | Optiboot, 512B�T�C�Y | �@ | Optiboot, 1kB�T�C�Y | �@ | �� ATmega1284P �̎d�l��A�u�[�g���[�_�[�̈�� 1kB ���ŏ��ŁA512B �ɐݒ�ł��܂���B |
| �@ | ���� | ���� | �@ | �E�� | ���� | |
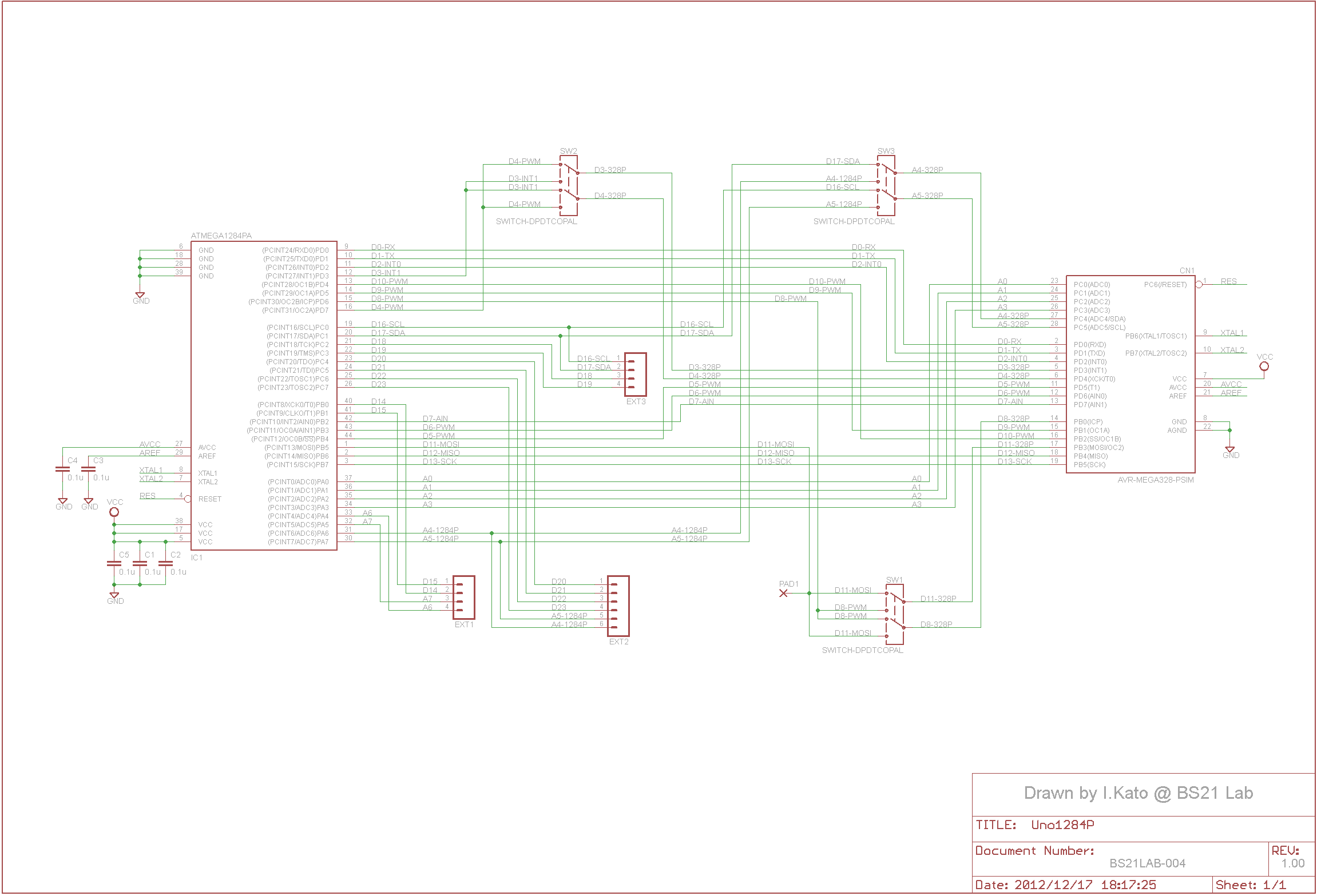
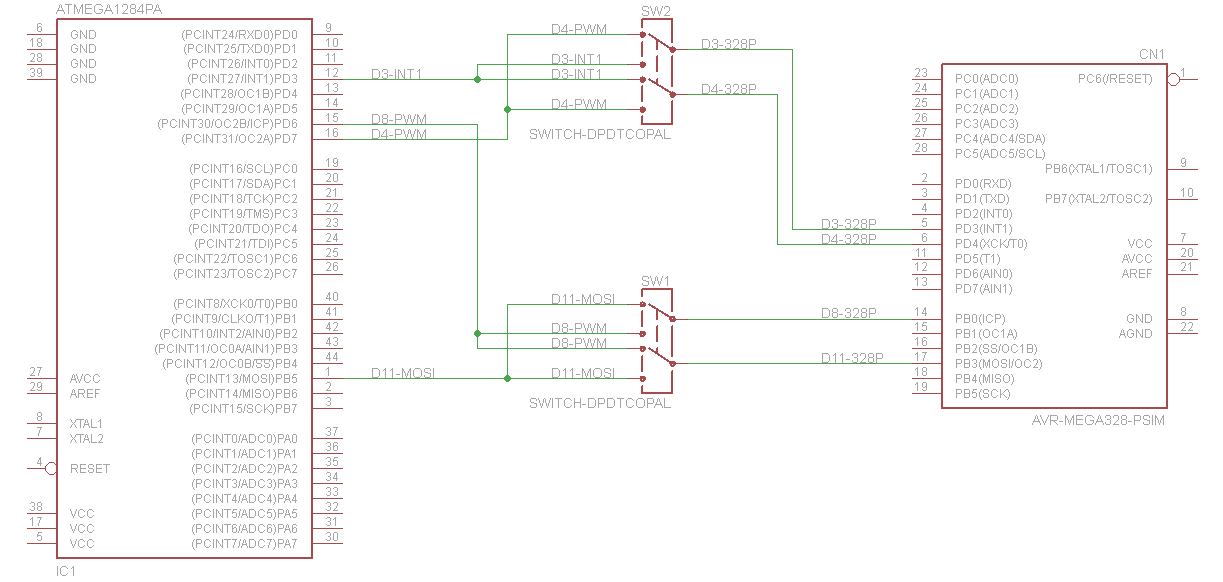
| SW1 | �@ | PWM11 | pin11 �� PWM �o�͂ɂ��܂��B SPI �ʐM�͕s�ɂȂ�܂��B | �@ | SPI | SPI �ʐM���鎞�́A������ɐݒ肵�܂��B ��@�\�Fpin8 �� PWM �o�͉\�ł��B |
| SW2 | �@ | PWM3 | pin3 �� PWM �o�͂ɂ��܂��B ��@�\�Fpin4 �� INT1 �����݂ɂȂ�܂��B | �@ | INT | pin3 �� INT1 �����݂ɂ��܂��B ��@�\�Fpin4 �� PWM �o�͉\�ł��B |
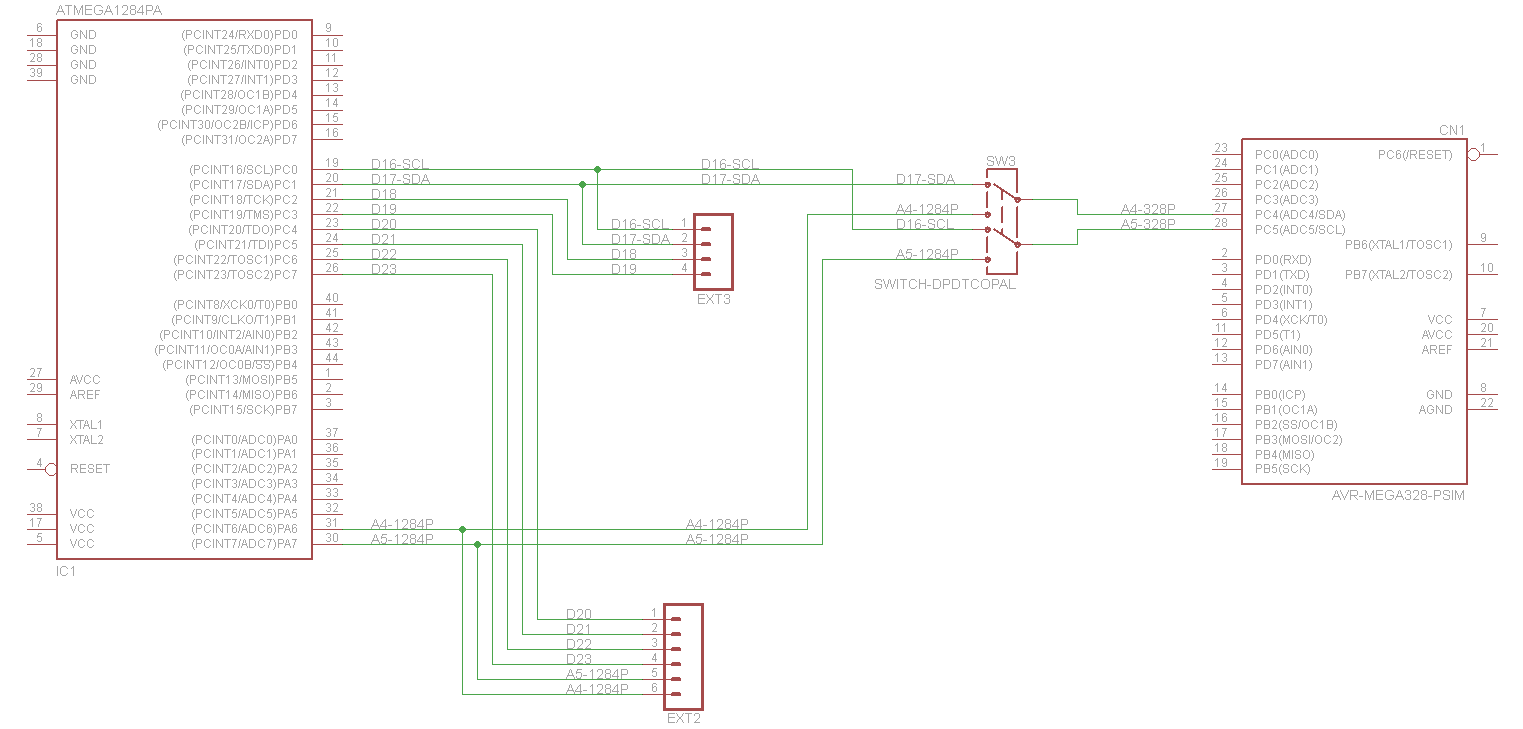
| SW3 | �@ | TWI | pin A4/A5 �� TWI �ʐM�ɂ��܂��B �A�i���O���� A4/A5 �� EXT2 �̂݁A�ɂȂ�܂��B | �@ | ANA | pin A4/A5 ���A�i���O���� A4/A5 �ɂ��܂��B TWI �ʐM�� EXT3 ���g���A���������g�p�\�ł��B |
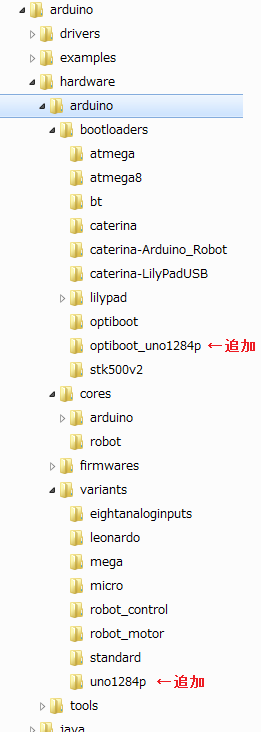
############################################################## uno1284p.name=Uno1284P uno1284p.upload.protocol=arduino uno1284p.upload.maximum_size=130048 uno1284p.upload.speed=115200 uno1284p.bootloader.low_fuses=0xFF uno1284p.bootloader.high_fuses=0xDE uno1284p.bootloader.extended_fuses=0xFD uno1284p.bootloader.path=optiboot_uno1284p uno1284p.bootloader.file=optiboot_uno1284p.hex uno1284p.bootloader.unlock_bits=0xFF uno1284p.bootloader.lock_bits=0xCF uno1284p.build.mcu=atmega1284p uno1284p.build.f_cpu=16000000L uno1284p.build.core=arduino uno1284p.build.variant=uno1284p |
// Uno1284P #elif defined(__AVR_ATmega1284P_UNO1284P__) #define TOTAL_ANALOG_PINS 8 #define TOTAL_PINS 32 // 24 digital + 8 analog #define VERSION_BLINK_PIN 13 #define IS_PIN_DIGITAL(p) ((p) >= 2 && (p) < TOTAL_PINS) #define IS_PIN_ANALOG(p) ((p) >= 24 && (p) < TOTAL_PINS) #define IS_PIN_PWM(p) digitalPinHasPWM(p) #define IS_PIN_SERVO(p) (IS_PIN_DIGITAL(p) && ((p) - 2) < MAX_SERVOS) #define IS_PIN_I2C(p) ((p) == 16 || (p) == 17) #define PIN_TO_DIGITAL(p) (p) #define PIN_TO_ANALOG(p) ((p) - 24) #define PIN_TO_PWM(p) PIN_TO_DIGITAL(p) #define PIN_TO_SERVO(p) ((p) - 2) |
#elif defined(__AVR_ATmega1284P_UNO1284P__)
// Uno1284P
// Two Wire (aka I2C) ports
uint8_t const SDA_PIN = 17;
uint8_t const SCL_PIN = 16;
// SPI port
uint8_t const SS_PIN = 10;
uint8_t const MOSI_PIN = 11;
uint8_t const MISO_PIN = 12;
uint8_t const SCK_PIN = 13;
static const pin_map_t digitalPinMap[] = {
{&DDRD, &PIND, &PORTD, 0}, // D0 0
{&DDRD, &PIND, &PORTD, 1}, // D1 1
{&DDRD, &PIND, &PORTD, 2}, // D2 2
{&DDRD, &PIND, &PORTD, 3}, // D3 3
{&DDRD, &PIND, &PORTD, 7}, // D7 4
{&DDRB, &PINB, &PORTB, 4}, // B4 5
{&DDRB, &PINB, &PORTB, 3}, // B3 6
{&DDRB, &PINB, &PORTB, 2}, // B2 7
{&DDRD, &PIND, &PORTD, 6}, // D6 8
{&DDRD, &PIND, &PORTD, 5}, // D5 9
{&DDRD, &PIND, &PORTD, 4}, // D4 10
{&DDRB, &PINB, &PORTB, 5}, // B5 11
{&DDRB, &PINB, &PORTB, 6}, // B6 12
{&DDRB, &PINB, &PORTB, 7}, // B7 13
{&DDRB, &PINB, &PORTB, 0}, // B0 14
{&DDRB, &PINB, &PORTB, 1}, // B1 15
{&DDRC, &PINC, &PORTC, 0}, // C0 16
{&DDRC, &PINC, &PORTC, 1}, // C1 17
{&DDRC, &PINC, &PORTC, 2}, // C2 18
{&DDRC, &PINC, &PORTC, 3}, // C3 19
{&DDRC, &PINC, &PORTC, 4}, // C4 20
{&DDRC, &PINC, &PORTC, 5}, // C5 21
{&DDRC, &PINC, &PORTC, 6}, // C6 22
{&DDRC, &PINC, &PORTC, 7}, // C7 23
{&DDRA, &PINA, &PORTA, 0}, // A0 24
{&DDRA, &PINA, &PORTA, 1}, // A1 25
{&DDRA, &PINA, &PORTA, 2}, // A2 26
{&DDRA, &PINA, &PORTA, 3}, // A3 27
{&DDRA, &PINA, &PORTA, 6}, // A6 28
{&DDRA, &PINA, &PORTA, 7}, // A7 29
{&DDRA, &PINA, &PORTA, 4}, // A4 30
{&DDRA, &PINA, &PORTA, 5}, // A5 31
};
//------------------------------------------------------------------------------
|
#elif defined(__AVR_ATmega1284P_UNO1284P__)
inline static void initSS() { DDRD |= _BV(4); };
inline static void setSS() { PORTD &= ~_BV(4); };
inline static void resetSS() { PORTD |= _BV(4); };
|
||defined(__AVR_ATmega328P__) || defined(__AVR_ATmega1284P_UNO1284P__) |
defined(__AVR_ATmega328P__) || defined (__AVR_ATmega328__) || defined(__AVR_ATmega1284P_UNO1284P__) |
| �s������ | Arduino UNO R3 | ATmega328P | �@ | Arduino Leonardo (�Q�l) | ATmega32U4 | �@ | Uno1284P | ATmega1284P | Uno1284P �̃R�����g | |
| pin0 | RX | PD0 | RX1/INT2 | PD2 | RX0/T3 | PD0 | ||||
| pin1 | TX | PD1 | TX1/INT3 | PD3 | TX0 | PD1 | ||||
| pin2 | INT0 | PD2 | INT1/SDA | PD1 | INT0/RX1 | PD2 | ||||
| pin3 | PWM (OC2B)/INT1 | PD3 | PWM (OC0B)/INT0/SCL | PD0 | INT1/TX1 | PD3 | SW2�� pin4(PWM) ��swap�\ | |||
| pin4 | T0/XCK | PD4 | ADC8/ICP1 | PD4 | PWM (OC2A) | PD7 | SW2�� pin3(INT1) ��swap�\ | |||
| pin5 | PWM (OC0B)/T1 | PD5 | PWM (0C3A) | PC6 | PWM (OC0B)/~SS | PB4 | SPI �g�p���͏o�̓��[�h�̂� (2013/7/10�NjL) | |||
| pin6 | PWM (OC0A)/AIN0 | PD6 | PWM (0C4D)/ADC10/T0 | PD7 | PWM (OC0A)/AIN1 | PB3 | ||||
| pin7 | AIN1 | PD7 | AIN0/INT6 | PE6 | AIN0/INT2 | PB2 | ||||
| pin8 | ICP1/CLKO | PB0 | ADC11 | PB4 | PWM (OC2B)/ICP1 | PD6 | SW1�� pin11(MOSI) ��swap�\ ��SPI �g�p�s�\�ɂȂ� | |||
| pin9 | PWM (OC1A) | PB1 | PWM (0C1A)/ADC12 | PB5 | PWM (OC1A) | PD5 | ||||
| pin10 | PWM (OC1B)/~SS | PB2 | PWM (0C1B)/ADC13 | PB6 | PWM (OC1B)/XCK1 | PD4 | ||||
| pin11 | PWM (OC2A)/MOSI | PB3 | PWM (0C0A/1C)/~RTS | PB7 | MOSI/ICP3 | PB5 | SW1�� pin8(PWM) ��swap�\ ��SPI �g�p�s�\�ɂȂ� | |||
| pin12 | MISO | PB4 | ADC9/T1 | PD6 | PWM (OC3A)/MISO | PB6 | ||||
| pin13 | SCK | PB5 | PWM (OC4A)/ICP3/CLKO | PC7 | PWM (OC3B)/SCK | PB7 | ||||
| pin14 | = pin A0 | PC0 | MISO/PDO | PB3 | T0/XCK0 | PB0 | �g���R�l�N�^EXT1 | |||
| pin15 | = pin A1 | PC1 | SCK/PDI | PB1 | T1/CLKO | PB1 | �g���R�l�N�^EXT1 | |||
| pin16 | = pin A2 | PC2 | MOSI | PB2 | SCL | PC0 | �g���R�l�N�^EXT3�FSW3�� pin A5(ADC7) �Ɛؑւ��\ | |||
| pin17 | = pin A3 | PC3 | SS/RXLED | PB0 | SDA | PC1 | �g���R�l�N�^EXT3�FSW3�� pin A4(ADC6) �Ɛؑւ��\ | |||
| pin18 | = pin A4 | PC4 | = pin A0 | PF7 | TCK | PC2 | �g���R�l�N�^EXT3 | |||
| pin19 | = pin A5 | PC5 | = pin A1 | PF6 | TMS | PC3 | �g���R�l�N�^EXT3 | |||
| pin20 | = pin A2 | PF5 | TDO | PC4 | �g���R�l�N�^EXT2 | |||||
| pin21 | = pin A3 | PF4 | TDI | PC5 | �g���R�l�N�^EXT2 | |||||
| pin22 | = pin A4 | PF1 | TOSC1 | PC6 | �g���R�l�N�^EXT2 | |||||
| pin23 | = pin A5 | PF0 | TOSC2 | PC7 | �g���R�l�N�^EXT2 | |||||
| pin A0 | ADC0 | PC0 | ADC7/TDI | PF7 | ADC0 | PA0 | ||||
| pin A1 | ADC1 | PC1 | ADC6/TDO | PF6 | ADC1 | PA1 | ||||
| pin A2 | ADC2 | PC2 | ADC5/TMS | PF5 | ADC2 | PA2 | ||||
| pin A3 | ADC3 | PC3 | ADC4/TCK | PF4 | ADC3 | PA3 | ||||
| pin A4 | ADC4/SDA | PC4 | ADC1 | PF1 | ADC6 | PA6 | �g���R�l�N�^EXT2�FSW3�� pin17(SDA) �Ɛؑւ��\ | |||
| pin A5 | ADC5/SCL | PC5 | ADC0 | PF0 | ADC7 | PA7 | �g���R�l�N�^EXT2�FSW3�� pin16(SCL) �Ɛؑւ��\ | |||
| pin A6 | ADC8 (= pin4) | PD4 | ADC4 | PA4 | �g���R�l�N�^EXT1 | |||||
| pin A7 | ADC10 (= pin6) | PD7 | ADC5 | PA5 | �g���R�l�N�^EXT1 | |||||
| pin A8 | ADC11 (= pin8) | PB4 | ||||||||
| pin A9 | ADC12 (= pin9) | PB5 | ||||||||
| pin A10 | ADC13 (= pin10) | PB6 | ||||||||
| pin A11 | ADC9 (= pin12) | PD6 | ||||||||
| pin SCL | = pin A5 | PC5 | = pin3 | PD0 | = pin16 | PC0 | UNO R3 �lj��s���\�P�b�g | |||
| pin SDA | = pin A4 | PC4 | = pin2 | PD1 | = pin17 | PC1 | UNO R3 �lj��s���\�P�b�g | |||
| pin MOSI | = pin11 | PB3 | = pin16 | PB2 | = pin11 | PB5 | ICSP �s�� | |||
| pin MISO | = pin12 | PB4 | = pin14 | PB3 | = pin12 | PB6 | ICSP �s�� | |||
| pin SCK | = pin13 | PB5 | = pin15 | PB1 | = pin13 | PB7 | ICSP �s�� |
#include <Arduino.h>
#include <PWM_pins.h>
void setup()
{
}
void loop()
{
for (int val = 0 ; val <= 255; val +=5) {
analogWrite(PWM13, val);
delay(30);
}
for (int val = 255 ; val >= 0; val -=5) {
analogWrite(PWM13, val);
delay(30);
}
}
|
| �@ | Arduino UNO R3 | Arduino Leonardo | Uno1284P | �@ | ���� | |
| PWM2 | �@ | �~ | �~ | �~ | �@ | |
| PWM3 | �@ | �� | �� | �� (���ۂ� PWM4 �w�肵�����Ɠ�������) | �@ | SW2 �Őؑւ� |
| PWM4 | �@ | �~ | �~ | �� | �@ | SW2 �Őؑւ� |
| PWM5 | �@ | �� | �� | �� | �@ | |
| PWM6 | �@ | �� | �� | �� | �@ | |
| PWM7 | �@ | �~ | �~ | �~ | �@ | |
| PWM8 | �@ | �~ | �~ | �� | �@ | SW1 �Őؑւ� |
| PWM9 | �@ | �� | �� | �� | �@ | |
| PWM10 | �@ | �� | �� | �� | �@ | |
| PWM11 | �@ | �� | �� | �� (���ۂ� PWM8 �w�肵�����Ɠ�������) | �@ | SW1 �Őؑւ� |
| PWM12 | �@ | �~ | �~ | �� | �@ | |
| PWM13 | �@ | �~ | �� | �� | �@ | L�`�J�\ |
pinMode(10, OUTPUT); digitalWrite(10, HIGH); |
| ���[�h�E�A�h���X | �o�C�g�E�A�h���X | �@ | �g�p�̈於�� | �@ | ���� |
| 0x0000 �` | 0x00000 �` | �@ | vector �e�[�u���̈� | �@ | 140�o�C�g�Œ�T�C�Y |
| 0x0046 �` | 0x0008C �` | �@ | PROGMEM �̈� | �@ | PROGMEM �錾���ꂽ�f�[�^���z�u�����B(.progmem.data �Z�N�V����) |
| vvvv �` | vvvv �~ 2 �` | �@ | ���e�[�u���̈� | �@ | �R���X�g���N�^/�f�X�g���N�^���e�[�u�����z�u�����ꍇ������ (.ctors/.dtors �Z�N�V����) ���݂���ꍇ�A�o�C�g�E�A�h���X 0x10000 ���Ă͂Ȃ�Ȃ��i������� 100���\�����܂��B��q�j |
| wwww �` | wwww �~ 2 �` | �@ | �v���O�����E�R�[�h�̈� | �@ | �v���O�����E�R�[�h�J�n�A�h���X (.init0 �Z�N�V����) |
| 0x8000 | 0x10000 | �@ | �@ | �� HIGH_PROGMEM ���g�p����ꍇ�́A�v���O�����E�R�[�h���o�C�g�E�A�h���X 0x10000 ���ׂ��ł���K�v������B | |
| (xxxx - 1) �` | (xxxx - 1) �~ 2 �` | �@ | �@ | �v���O�����E�R�[�h�I���A�h���X (.fini1 �Z�N�V����) | |
| xxxx �` | xxxx �~ 2 �` | �@ | HIGH_PROGMEM �̈� | �@ | HIGH_PROGMEM �錾���ꂽ�f�[�^���z�u�����B(.fini0 �Z�N�V����) �o�C�g�E�A�h���X 0x10000 �ȏ�ɔz�u����Ă���K�v������B |
| yyyy �` | yyyy �~ 2 �` | �@ | DATA �̈�̏����l | �@ | startup ���[�`���� SRAM �ɃR�s�[�����B�R�s�[��� SRAM �̕��� Read/Write ����̂ŁA�����̂̓A�N�Z�X����Ȃ��B |
| zzzz �` | zzzz �~ 2 �` | �@ | �̈� | �@ | |
| 0xFE00 �` | 0x1FC00 �` | �@ | BootLoader �̈� | �@ | 1kB �Œ�BArduino IDE ����͓ǂݏ����ł��܂���i�ǂݏ�������ɂ� AVRISP mkII �����K�v�j |
| 0xFFFF | 0x1FFFE | �@ | Memory ���� | �@ |
| �o�C�g�E�A�h���X | �@ | �g�p�̈於�� | �@ | ���� |
| 0x0000 �` | �@ | SFR �̈� | �@ | 256�o�C�g�Œ�T�C�Y |
| 0x0100 �` | �@ | ���� SRAM �J�n | �@ | Stack �̈�܂߂čő� 16384 �o�C�g |
| ssss �` | �@ | Stack �̈� | �@ | |
| 0x40FF | �@ | ���� SRAM ���� | �@ | |
| 0x4100 �` | �@ | SRAM ������ | �@ | ATmega1284P �͊g�� SRAM �@�\�������̂ŁA�A�N�Z�X�s�� |
| 0xFFFF | �@ | Memory ���� | �@ |
| �@ | �@ | �@ | �@ | �@ | HIGH_PROGMEM const char | �@ | abc [10000]; |
| �@ | �@ | �@ | �@ | �@ | HIGH_PROGMEM const uint16_t | �@ | xyz [10000]; |
| �f�[�^�̈ʒu | �|�C���^�̃T�C�Y | Uno1284P �Ŏw��ł���A�h���X�͈̔� | lpm/elpm ���b�p�[���� | �g�p�\�Ȋ����̏��� | ���� | |
| SRAM �� | �Q�o�C�g�� | 0x0000�`0x40FF | ���� | xxx | �ǂݏ����� | |
| �t���b�V���������� | PROGMEM �錾 | �Q�o�C�g�� | 0x000000�`0x00FFFF | pgm_read_xxx ���Q | xxx_P | �ǂݏo���̂� |
| �S�o�C�g�� | 0x000000�`0x01FBFF | pgm_read_xxx_far ���Q | xxx_PF (�ŐV�� avr-gcc �̂݁BArduino IDE 1.0.5 �ł͕s��) | |||
| HIGH_PROGMEM �錾 | �Q�o�C�g�� | 0x010000�`0x01FBFF | pgm_read_xxx_hi ���Q | |||
| �S�o�C�g�� | 0x000000�`0x01FBFF | pgm_read_xxx_far ���Q | xxx_PF (�ŐV�� avr-gcc �̂݁BArduino IDE 1.0.5 �ł͕s��) | |||
| �߂�l | ���� | ���� | �@ | ���� |
| void | UseHighProgMem | (void) | �@ | �ȉ��̊����g�p����O�ɂP���Ăяo���B(RAMPZ ���P�ɐݒ肷�邾��) |
| uint8_t | pgm_read_byte_hi | (uint8_t *addr) | �@ | addr �Ŏw�肳�ꂽ HIGH_PROGMEM �̈�̃o�C�g�f�[�^���P�ǂݏo���B |
| uint16_t | pgm_read_word_hi | (uint16_t *addr) | �@ | addr �Ŏw�肳�ꂽ HIGH_PROGMEM �̈�̃��[�h�f�[�^���P�ǂݏo���B |
| uint32_t | pgm_read_dword_hi | (uint32_t *addr) | �@ | addr �Ŏw�肳�ꂽ HIGH_PROGMEM �̈�̃_�u�����[�h�f�[�^���P�ǂݏo���B |
| float | pgm_read_float_hi | (float *addr) | �@ | addr �Ŏw�肳�ꂽ HIGH_PROGMEM �̈�̒P���x���������_�f�[�^���P�ǂݏo���B |
| void * | memcpy_PH | (void * dest, const void * src, size_t len) | �@ | src �Ŏw�肳�ꂽ HIGH_PROGMEM �̈�̃f�[�^���ASRAM ��� dest �� len �o�C�g���A�R�s�[����B�߂�l�� dest ���̂��́B |
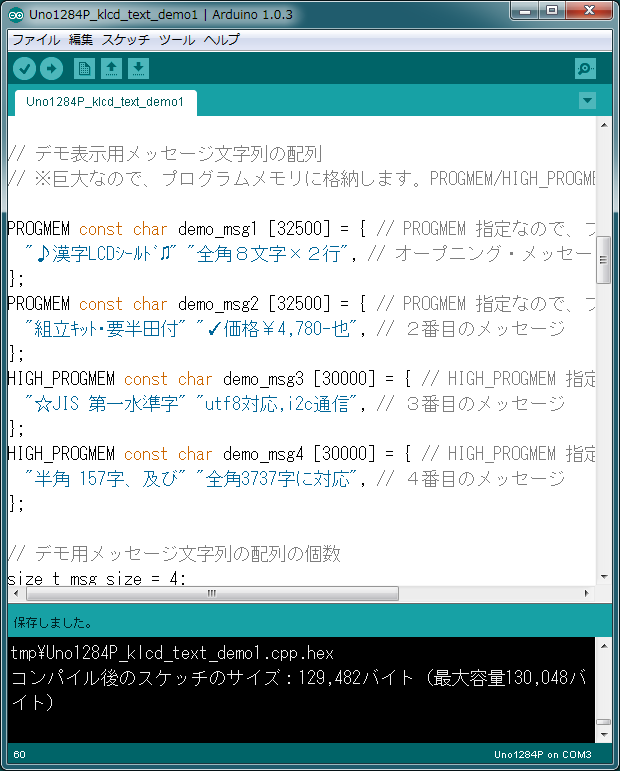
PROGMEM const char str1 [32500] = "abcdefg1"; // �t���b�V���������O�� 64kB ���ɔz�u
PROGMEM const char str2 [32500] = "abcdefg2"; // ����
HIGH_PROGMEM const char str3 [32500] = "abcdefg3"; // �t���b�V���������㔼 64kB ���ɔz�u
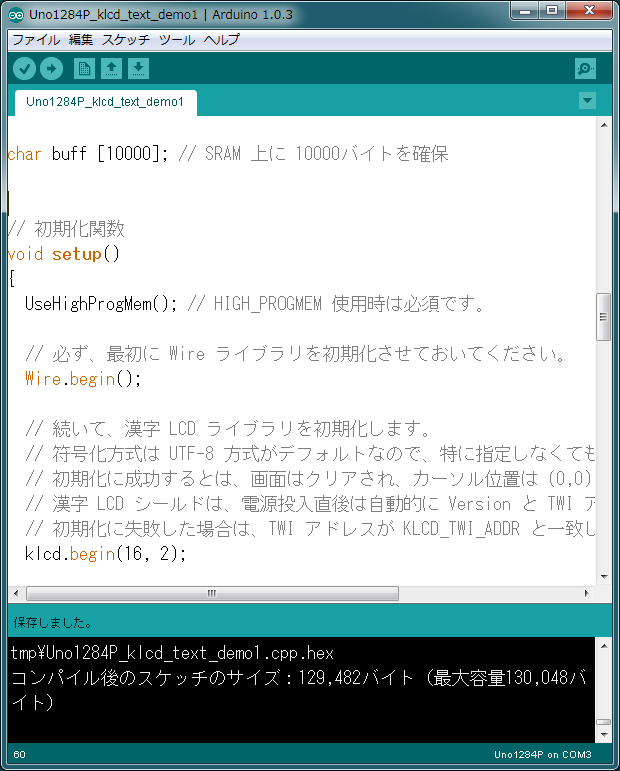
char buff [10000]; // SRAM ��� 10000�o�C�g�m��
void setup()
{
char ch;
memcpy_P ( &ch, str1, 1 ); // �R���p�C�����̍œK���� str1 �������Ă��܂�Ȃ��ׂ̑�
memcpy_P ( &ch, str2, 1 ); // �R���p�C�����̍œK���� str2 �������Ă��܂�Ȃ��ׂ̑�
UseHighProgMem(); // HIGH_PROGMEM �g�p���͕K�{
ch = pgm_read_byte_hi ( &str3[3] ); // HIGH_PROGMEM �̈悩��P�o�C�g�ǂݏo���B���̏ꍇ�� 'd' �̕����B
memcpy_PH ( buff, str3, sizeof(buff) ); // HIGH_PROGMEM �̈悩��ASRAM ��� buff �� 10000 �o�C�g���A�R�s�[
}
void loop()
{
}
|
00000000 <__vectors>: �� vector �e�[�u���̈�J�n�A�h���X
0: 0c 94 3a 7f jmp 0xfe74 ; 0xfe74 <__ctors_end>
�i�����j
88: 0c 94 5a 7f jmp 0xfeb4 ; 0xfeb4 <__bad_interrupt>
0000008c <_ZL4str1>: �� PROGMEM �̈�J�n�A�h���X�B���� _ZL4 �́uconst char �z��v�̈Ӗ����Ǝv����B
8c: 61 62 63 64 65 66 67 31 00 00 00 00 00 00 00 00 abcdefg1........
...
00007f80 <_ZL4str2>:
7f80: 61 62 63 64 65 66 67 32 00 00 00 00 00 00 00 00 abcdefg2........
...
0000fe74 <__ctors_end>: �� �v���O�����E�R�[�h�̈�J�n�A�h���X�B__ctors_end �ƂȂ��Ă��邪�A�{���� __init �ł���ׂ��B������ 0x00010000 �ȉ��ɂȂ��Ă���� OK
fe74: 11 24 eor r1, r1
�i�����j
fffe: 85 bd out 0x25, r24 ; 37 �� ������ 0x00010000 �̋��E���ׂ��ł���
10000: ee e6 ldi r30, 0x6E ; 110
�i�����j
10074: 08 95 ret
00010076 <stop_program_in_fini1_sec>: �� �����̃A�h���X�� 0x0000FFFC �ȏ�ɂȂ��Ă���� OK
10076: f8 94 cli
10078: ff cf rjmp .-2 ; 0x10078 <stop_program_in_fini1_sec+0x2>
0001007a <_ZL4str3>: �� HIGH_PROGMEM �̈�J�n�A�h���X�B���� 0x00010000 �ȏ�ɔz�u����Ă���B
1007a: 61 62 63 64 65 66 67 33 00 00 00 00 00 00 00 00 abcdefg3........
...
17f6e: f8 94 cli
00017f70 <__stop_program>:
17f70: ff cf rjmp .-2 ; 0x17f70 <__stop_program>
|